伴随空间生命科学研究的不断深入,以生物活细胞等微纳颗粒为作动对象的精密微操控技术在面向未来的载人航天基础研究以及空间环境下的生物医学研究中发挥着日益重要的作用,是研制空间生命科学仪器装置必须突破的关键核心技术之一。近年来,具有主动操控功能的智能化微纳米机器人平台已成为精密微操控技术的热门研究领域之一,在精准捕获生物颗粒以及高精度运输和富集方面展示了良好的性能,为实现传感器由传统的被动扩散式到主动富集式检测方式的革新提供了全新的手段。因此,深入开展面向航天员的健康监测微系统的微纳米机器人推进机理和集群化操控方法,具有重要的基础研究价值和广阔的工程应用前景。
在国家自然科学基金的支持下,机械结构力学及控制国家重点实验室芦小龙副教授(第一作者,通讯作者)与南京工业大学合作,利用超声微驱动手段在微纳米机器人集群操控技术方面取得了新的进展,近期以“基于声电复合电极的微纳米机器人集群通用控制策略”为题的一篇研究成果被选作封面文章发表于国际著名期刊《Small》(影响因子13.281)。
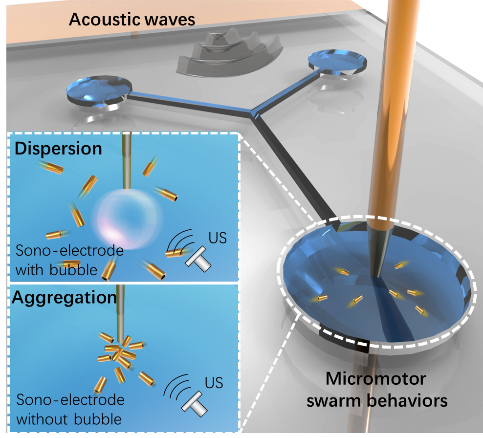
基于声电复合电极的微纳米机器人集群通用控制方法
本研究通过引入一种针式声电复合电极,实现了管状和球状微纳米机器人的通用化集群控制以及运动模式的可控切换。通过电解水生成气泡技术,在电极尖端形成微米级气泡振动核,受超声场激励发生共振,进而形成局部增强型声流场,驱动邻近的微纳米机器人快速分散至其他区域。去除气泡后,该声电复合电极又可作为声学隔振器,提供固定边界用于阻挡声能在流体中的传播,进而在电极周围形成能量势阱,驱动大范围内分散的微纳米机器人富集至电极下方。理论计算和试验结果均表明,声电复合电极的这两种功能模式在不同超声频率激励下不存在耦合干扰。典型结构的微纳米机器人可以实现474μm/s的快速分散和17.8μm/s的定点富集。所述声电复合电极集气泡共振器和声学隔振器功能于一身,实现了两种集群化运动的自由切换。本研究目前的局限性在于无法有效驱动直径大于30μm的大型微纳机器人集群运动。此外,针对活性微生物(如细菌)的主动操控能力和干扰因素也有待进一步的研究。但是,该集群化操控平台能够实现与现有电化学检测平台的高度集成,为实现基于微纳米机器人的主动超灵敏检测技术提供了可能。下一步研究将针对功能化微纳米机器人及其电化学检测应用展开,为空间环境下使用的健康监测微系统研究奠定基础。
论文全文链接:https://onlinelibrary.wiley.com/doi/10.1002/smll.202104516


