芦小龙副教授ACS Nano:面向微纳机器人的人机交互
在国家自然科学基金和江苏省自然科学基金的支持下,本研究所芦小龙副教授联合南京工业大学、南京大学和加州大学圣地亚哥分校组成的研究团队在微纳机器人的智能化驱动方面取得最新进展,研究成果以“基于声操控的微纳机器人人机交互技术”为题发表于国际著名期刊《ACS Nano》(影响因子13.903)。
具有靶向输运功能的微纳机器人系统在精准给药、细胞微手术、生物传感和纳米装配等领域有着广泛的应用前景。然而,微纳米机器人的受控运动仍然面临诸多挑战。其中,用于微纳米机器人与使用者之间的快速交互控制技术就是制约微纳米机器人智能化水平的关键难题之一。尽管目前已经出现了化学能驱动、光能驱动、磁能驱动和声能驱动等多种作动形式的微纳米机器人技术,并且在机器人的作动性能和应用等方面取得了大量创新成果,然而,微纳米机器人的智能化控制一直鲜有突破。
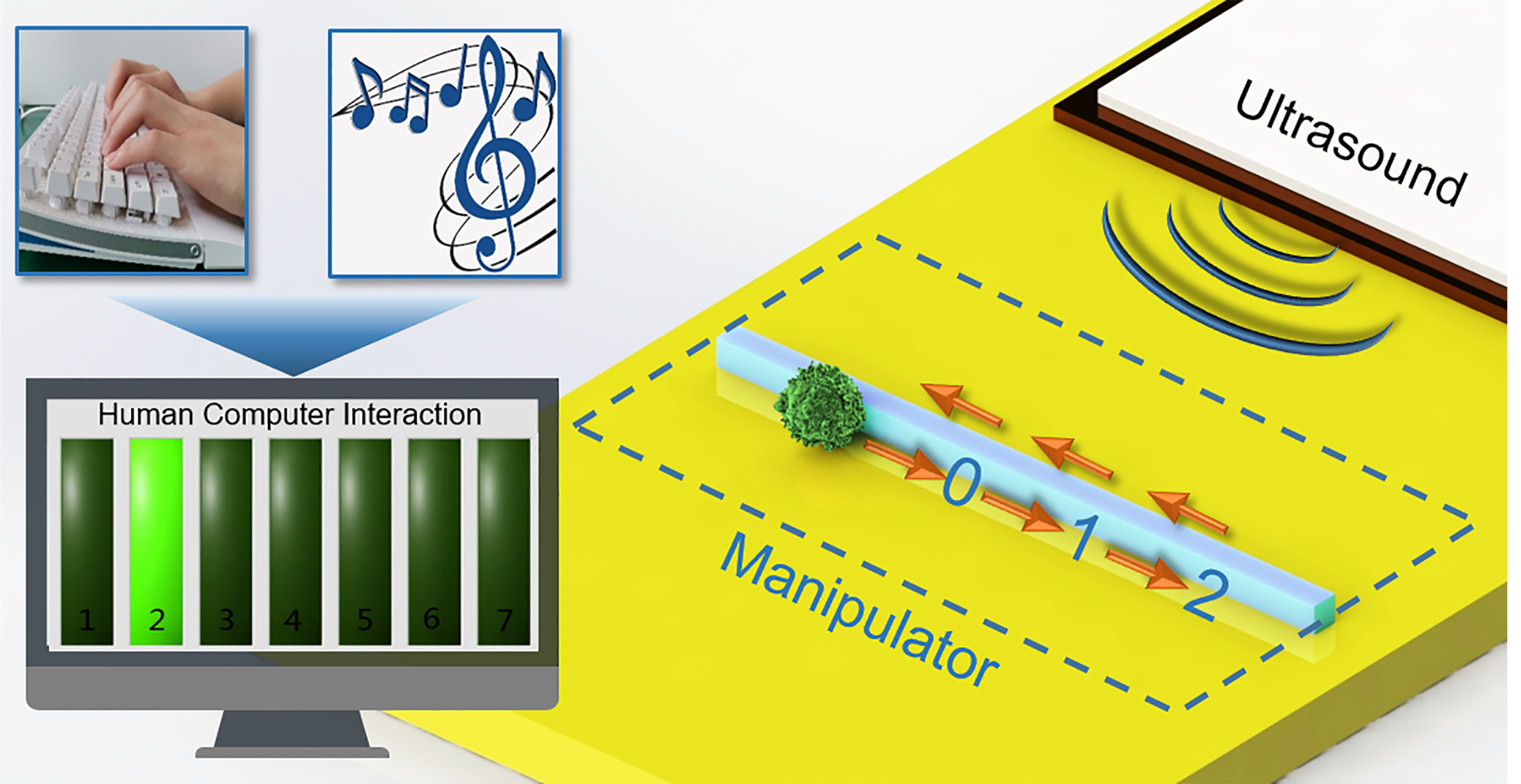
该研究团队针对这一问题,在精准声操控平台上提出并验证了一种用于快速识别用户的输入指令并处理成特定驱动信号的微型机器人人机交互技术,实现了对微纳米颗粒的精准输运。微操控型机器人利用局部声流场产生驱动力,可实现人造微颗粒和生物细胞颗粒等微观粒子沿着特定轨迹精准运输的功能,运输全过程可以通过改变超声激励频率和持续时间进行调节。所构建的人机交互控制系统可以智能识别用户通过键盘和声音等方式输入的包含位置信息的操控指令,进而实现对微操控机器人工作模式的智能化控制。例如,在该控制系统中输入一段音乐,即可实现对单个肿瘤细胞在不同位置的可控式精准输运。虽然当前的人机交互平台是基于声驱动型微机器人提出的,但是,该技术在未来有望进一步拓展至更多类型的微纳米机器人体系当中,为早日实现微纳米机器人的智能化驱动奠定了基础。
论文全文链接:https://pubs.acs.org/doi/10.1021/acsnano.9b04930


