芦小龙,教授,博士研究生导师
学科专业:机械设计及理论
(招收机械类、力学类和飞设类硕士研究生)
研究领域:微尺度智能作动技术
(Micro Intelligent Actuation, MIA)
本科教学:理论力学
纳米机器人的奇幻旅程(素质拓展课)
作动器的缤纷世界(素质拓展课)
大学生创新训练计划指导教师
办公室电话:025-84896346
个人简介
2014年博士毕业于南京航空航天大学,师从中科院院士赵淳生教授和长江学者胡俊辉教授。2014年受聘为讲师,2016年晋升副教授职称。美国国加州大学圣地亚哥分校(University of California San Diego)访问学者,德国马克思普朗克智能系统研究所博士后,入选南京航空航天大学首届“长空学者”人才计划(长空英才),德国洪堡奖学金(Alexander Von Humboldt Fellowship)获得者。机械结构力学及控制国家重点实验室固定科研人员,中国声学学会会员,中国航空学会会员,中国力学学会会员,《振动、测试与诊断》编委会委员。担任《Sensors and Actuators A Physical》、《Transactions of Nanjing University of Aeronautics and Astronautics》、《振动、测试与诊断》等SCI/EI收录期刊审稿人、2018年国际压电材料及器件应用研讨会(IWPMA2018)分会场主席、2019年国际智能机器人技术及其应用大会(ICIRA2019)压电作动及微纳驱动技术分会组织者。长期致力于跨尺度压电作动机理及其应用的研究,在微尺度智能作动技术领域开展了大量的理论研究和器件设计工作,主持/参与国家自然科学基金、江苏省自然科学基金等项目十余项,已发表SCI期刊论文16篇(1区TOP期刊7篇,最高影响因子12.102),EI期刊/会议论文10篇,申请发明专利16项(授权12项),在美国、德国、日本、新加坡、北京等国际/国内会议上做口头报告15次(邀请报告1次)。
工作经历
(5)2019/03-至今,德国马克思普朗克智能系统研究所,微纳与分子系统实验室,洪堡学者
(4)2019/01-至今,南京航空航天大学,航空学院,副教授
(3)2016/06-2018/12,南京航空航天大学,航空宇航学院,副教授
(2)2016/08-2017/08,美国加州大学圣地亚哥分校,纳米工程系,访问学者
(1)2014/04-2016/05,南京航空航天大学,航空宇航学院,讲师
研究方向
(1)用于空间环境的超声电机
在超声驱动机理和器件设计关键技术方面,本人在攻读博士学位期间,跟随南京航空航天大学赵淳生院士开展了超声电机的模态分析、振型选择和优化设计的研究(图1所示),结合电机的工作原理,提出了相应的新型超声电机结构(Sensors and Actuators A Physical 2013)。借助有限元分析,确定电机的工作模态和关键尺寸参数,并试验验证了环境因素(如真空度,温度等)对作动器输出性能的影响(Journal of Intelligent Material and Systems 2014)。相关研究成果已成功运用到嫦娥三号月兔车项目中(图2所示),圆满完成了各项技术需求。基于超声驱动机理构建的新型超声电机设计方案多次发表在本领域国际主流学术刊物上(Sensors and Actuators A Physical 2013-2,Energy 2013, Review of Scientific Intruments 2014)。申请人近期在超声驱动技术的能量效率和结构小型化方面开展研究,如将质量分布因素考虑在内设计了一种高能效的超声换能器(Ultrasonics 2017)。相关研究方案为用于空间环境的超声电机的设计与优化奠定了技术基础。

图1在赵院士指导下开展实验 图2用于嫦娥三号的超声电机
(2)基于压电作动的水下自重构机器人
水下机器人在海洋探测领域发挥着日益重要的作用,可以完成深海资源探测、海洋水文监测以及深海打捞救助等任务。鉴于水下机器人在民用与国防上的重要性,依托压电精密驱动技术的最新进展,提出一种具有自重构功能的水下机器人(图3-6所示),以高功率密度的双转子输出型超声电机作为机器人的动力推进装置,不同机器人个体之间在电磁场的控制下完成结构重组,进而提升机器人集群在复杂水域中的机动性和环境适应能力。采用超声电机驱动的水下机器人,克服了驱动单元与重构单元的相互电磁干扰问题,可实现无电磁屏蔽结构设计,有效地减小了单元个体的尺寸与重量,为实现大规模集群化单元个体之间的重构与变形提供了可能。
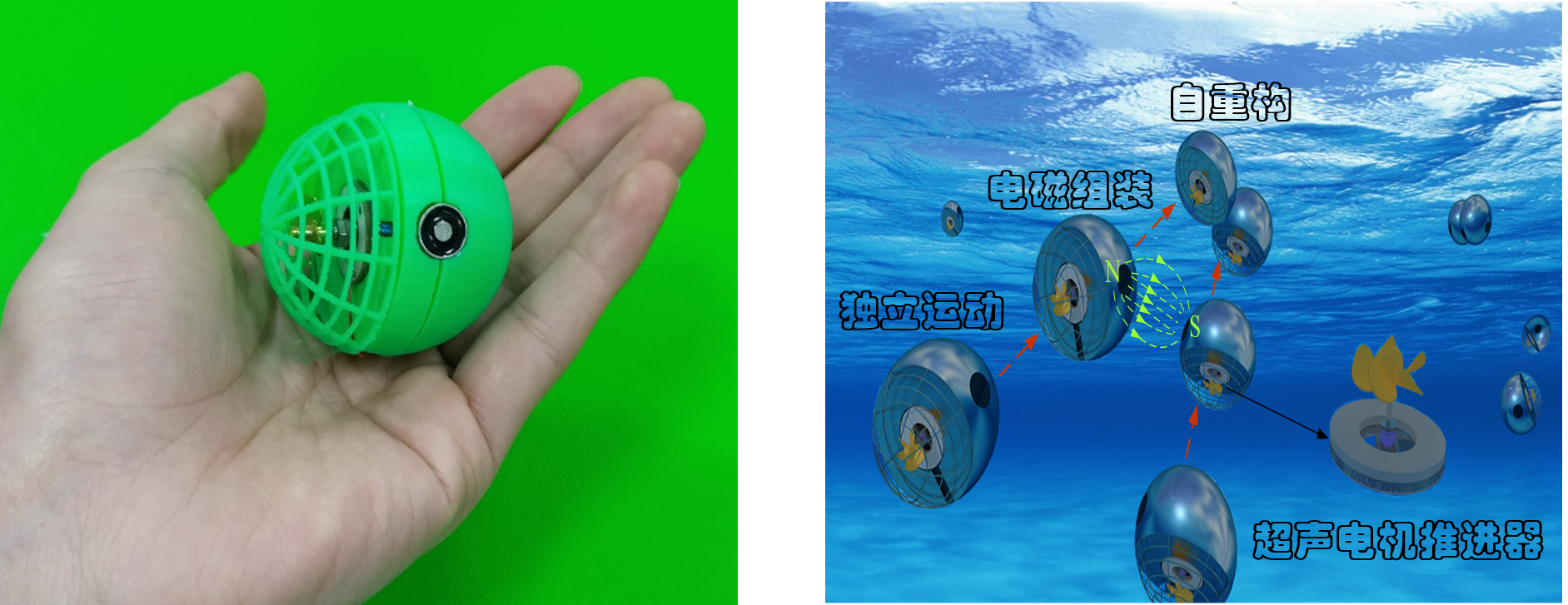
图3水下机器人单体 图4水下机器人自重构过程演示

图5双轴输出型推进器 图6圆筒型水下机器人结构设计方案
(3)基于超声驱动的纳米马达技术
纳米马达是纳米机器人的重要组成部件。本课题组利用在微小型超声电机研究方面总结的技术经验,研制了初期的基板型声操控平台,实现了对不同构型纳米马达的定向操控,并于2016年获得国家自然科学基金青年基金支持(声场驱动的纳米马达的结构特征和操纵技术研究,51505222)。
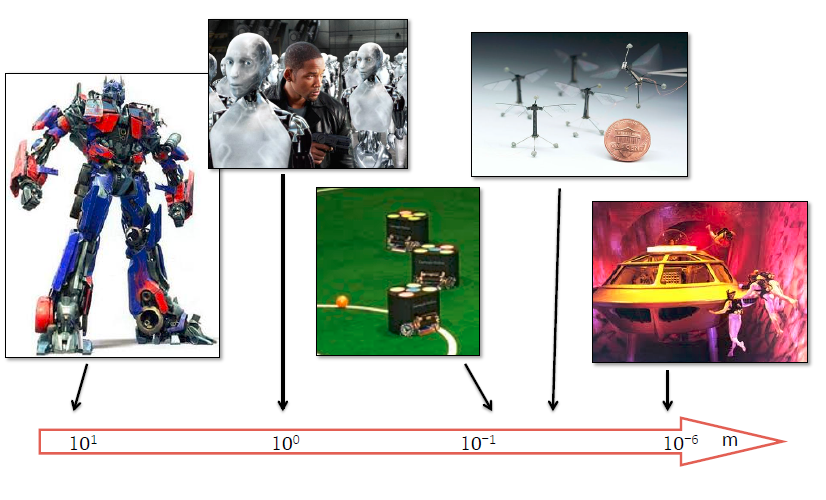
图7不同尺度下的智能系统/机器人的比较
图8所示为不同类型纳米马达的声流场驱动效果。运用模板辅助电化学沉积的方法制备了管状微马达(图8a),设计了迷宫型二维复杂微结构(图8b),然后开展了不同粒径聚苯乙烯(PS)微球的驱动特性研究,表明声流场对微纳颗粒的作用效果具有较好的重复性。此外构建了用于捕获分选的声操控平台,针对不同尺寸的微纳颗粒开展了声操控捕获的基础研究(Small 18,ACS Applied Materials and Interfaces 17,2018年国际功能材料与器件研讨会(GW-FMD 2018)特邀报告)。
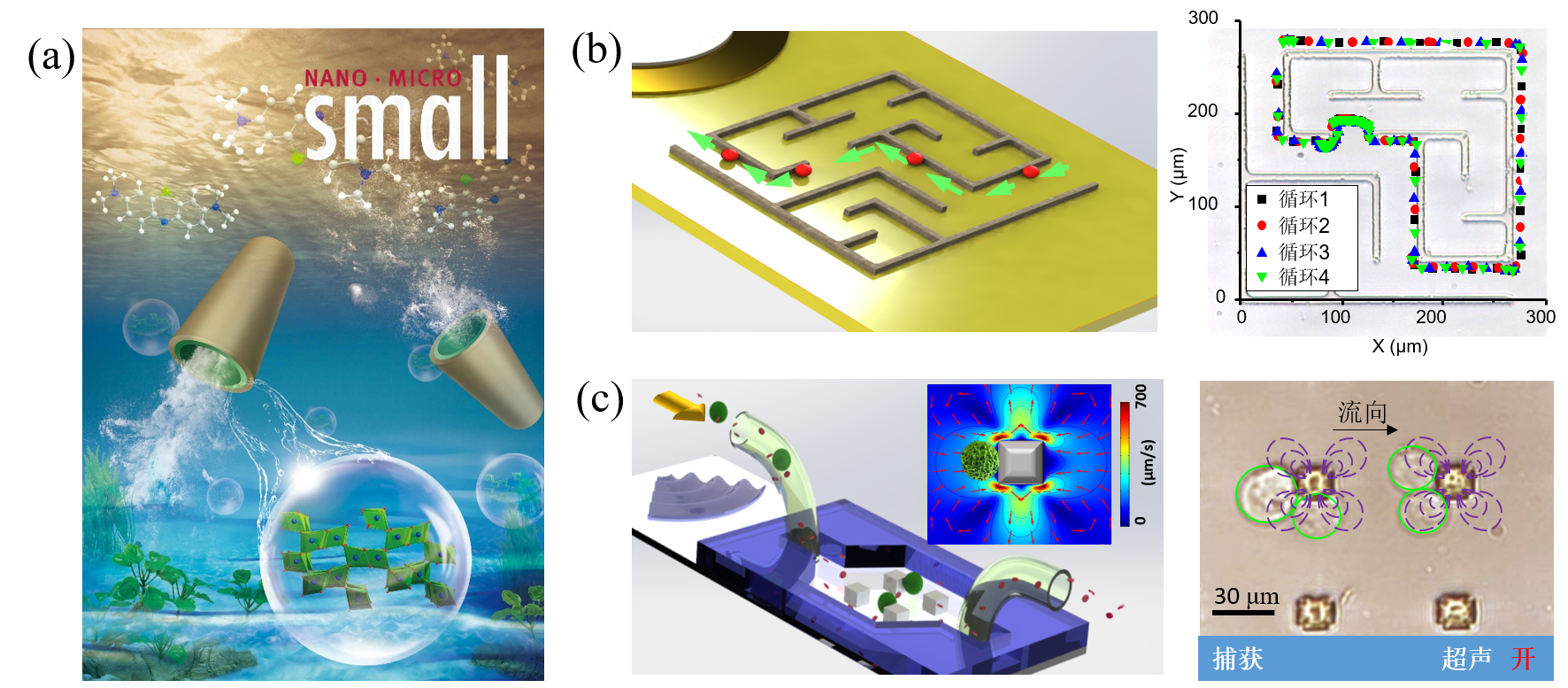
图8声流场对不同构型纳米马达的操控技术研究
主持的科研项目
(8)国家商用飞机制造工程技术研究中心创新基金项目,用于航空壁板框架的便携式多模态超声喷丸设备关键技术研究,2020/01-2021/12,在研,主持
(7)国家自然科学基金青年项目, 51975278,基于声流效应的声操控型精密微流控平台的机理与应用研究,2020/01-2023/12,在研,主持
(6)南京航空航天大学青年科技创新基金项目,NS2019009,面向芯片实验室的声操控动力微组件关键技术研究,2019/01-2021/06,在研,主持
(5)机械结构力学及控制国家重点实验室项目,MCMS-I-0318Y01,声操控动力微组件的关键技术研究,2018/01-2019/12,在研,主持
(4)江苏省自然科学基金面上项目,BK20181292,基于压电作动的水下自重构机器人关键技术研究,2018/07-2020/12,在研,主持
(3)国家自然科学基金青年项目, 51505222,声场驱动的纳米马达的结构特征及操控技术研究,2016/01-2018/12,已结题,主持
(2)超声电机国家地方联合工程实验室科研基地创新基金,NJ20150002,高能效压电换能器的设计与实验研究,2015/01-2016/12,已结题,主持
(1)南京航空航天大学基础科研项目,驱动微/那米颗粒旋转的基板型超声电机的研究,2012/01-2013/12,已结题,主持
代表性研究成果
(1)SCI&EI论文:
*2019:
28. Hui Shen; Kangdong Zhao; Zhiwen Wang; Xiaoyu Xu; Jiayu Lu; Wenjuan Liu;Xiaolong Lu(*). Local Acoustic Fields Powered Assembly of Microparticles and Applications. Micromachines 2019, 10, 882; SCI三区,IF: 2.426
27.Xiaolong Lu(#) (*); Zhiwen Wang; Hui Shen; Kangdong Zhao; Tianyue Pan; Deqing Kong; Jens Twiefel. A Novel Dual-Rotor Ultrasonic Motor for Underwater Propulsion. Appl. Sci. 2020, 10, 31; SCI四区,IF: 2.217
26.Xiaolong Lu(#) (*); Kangdong Zhao; Wenjuan Liu; Dongxin Yang; Hui Shen; Hanmin Peng; Xiasheng Guo; Jinxing Li; Joseph Wang, A Human Microrobot Interface Based on Acoustic Manipulation, ACS Nano, 2019, 13, 10, 11443-11452; SCI一区,IF: 13.904
25. Liu Wenjuan(#)(*); Ge Hongbin; Chen Xiao;Lu Xiaolong(*); Gu Zhongwei; Li Jinxing(*); Wang Joseph, Fish-Scale-Like Intercalated Metal Oxide-Based Micromotors as Efficient Water Remediation Agents, ACS Applied Materials & Interfaces, 2019.5.1, 11(17): 16164~16173 ; SCI一区,IF: 8.097
24.Lu, Xiaolong(#)(*); Shen, Hui; Zhao, Kangdong; Wang, Zhiwen; Peng, Hanmin; Liu, Wenjuan, Micro-/Nanomachines Driven by Ultrasonic Power Sources, Chemistry-An Asian Journal, 2019.7.15, 14(14): 2406~2416 ; SCI一区,IF: 3.698
23. Wang, Le(#); Hou, Yuanjun; Zhao, Kangdong; Shen, Hui; Wang, Zhiweng; Zhao, Chunsheng;Lu, Xiaolong(*), A novel piezoelectric inertial rotary motor for actuating micro underwater vehicles, Sensors and Actuators A: Physical, 2019.8.15, 295: 428~438 ; SCI三区,IF: 2.327
22.Xiaolong Lu(*); Kangdong Zhao; Hanmin Peng; Huafeng Li; Wenjuan Liu, Local enhanced microstreaming for controllable high-speed acoustic rotary microsystems, Physical Review Applied, Accepted. SCI一区,IF: 4.782
*2018:
21.Xiaolong Lu(#); Aida Martin; Fernando Soto; Pavimol Angsantikul; Jinxing Li; Chuanrui Chen; Yuyan Liang; Junhui Hu; Liangfang Zhang(*); Joseph Wang(*), Parallel Label-Free Isolation of Cancer Cells Using Arrays of Acoustic Microstreaming Traps, Advanced Materials Technology, 2018.08.21 , 2018:1800374 SCI二区,IF: 4.622
20. Le Wang(#); Yongjie Wang;Xiaolong Lu(*); Chunsheng Zhao, A disk-shaft shaped high-speed rotary ultrasonic motor, Review of Scientific Instruments, 2018.12.18 , 89:126106 SCI四区,IF: 1.428
19. Hanmin Peng(#)(*); Jianzhi Yang;Xiaolong Lu(*); Pancheng Zhu; Dawei Wu, A light-weight surface milli-walker based on piezoelectric actuation, IEEE Transactions on Industrial Electronics ,Accepted. SCI一区,IF: 7.050
18. Chuanrui Chen, Xiaocong Chang, Teymourian, H., Ramírez‐Herrera DE,Xiaolong Lu, et al (2018): Bioinspired Chemical Communication between Synthetic Nanomotors. Angewandte Chemie International Edition, 57 (1), 241-245. SCI一区,IF:12.102
17. Wenjuan Liu, Hongbin Ge, Zhongwei Gu,Xiaolong Lu(*), Jinxing Li, Joseph Wang, (2018): Electrochemical Deposition Tailors the Catalytic Performance of MnO2‐Based Micromotors. In: Small,2018, 14, 1802771. SCI一区,IF: 9.598
*2017:
16.Xiaolong Lu, Fernando Soto, Jinxing Li, Tianlong Li, Yuyan Liang, Joseph Wang*. Topographical Manipulation of Microparticles and Cells with Acoustic Microstreaming. ACS Applied Material and Interfaces, 2017, 9(44): 38870-38876 SCI一区,IF: 8.097
15.Xiaolong Lu, Junhui hu*, Hanmin Peng, Yuan Wang. A new topological structure for the Langevin-type ultrasonic transducer. Ultrasonics, 2017, 75:1-8. SCI三区,IF: 2.377
14.Mishra, R. K., Martín, A., Nakagawa, T., Barfidokht, A.,Xiaolong Lu, & Sempionatto, J. R., et al. (2017). Detection of vapor-phase organophosphate threats using wearable conformable integrated epidermal and textile wireless biosensor systems. Biosensors & Bioelectronics, 101, 227. SCI一区, IF: 8.173
13.Sempionatto, J. R., Mishra, R. K., Martín, A., Tang, G., Nakagawa, T.,Xiaolong Lu, et al. (2017). Wearable ring-based sensing platform for detecting chemical threats. Acs Sensors, 2(10), 1531. SCI一区,IF: 5.711
*2014
12.Xiaolong Lu, Junhui Hu*, Satyanarayan Bhuyan, Shiyang Li. An ultrasonic contact-type position restoration mechanism. Review of Scientific Instruments, 2014, 85(12): 124901. SCI四区,IF: 1.428
11.Xiaolong Lu, Junhui Hu*, Lin Yang, Chunsheng Zhao. A novel in-plane mode rotary ultrasonic motor. Chinese Journal of Aeronautics, 2014, 27(2): 420-424. SCI四区,IF: 1.614
10.Xiaolong Lu, Qi Zhang, Junhui Hu*. A linear piezoelectric actuator based solar panel cleaning system. Energy, 2013, 60(4): 401-406. SCI二区,IF: 4.520
9.Xiaolong Lu, Shengqiang Zhou, Chunsheng Zhao*. Finite element method analyses of ambient temperature effects on characteristics of piezoelectric motors. Journal of Intelligent Material Systems & Structures, 2014, 25(3): 364-377. SCI三区,IF: 2.211
*2013:
8.Xiaolong Lu, Junhui Hu*, Qi Zhang, Lin Yang, Chunsheng Zhao. An ultrasonic driving principle using friction reduction. Sensors & Actuators A Physical, 2013, 199(17): 187-193.SCI三区,IF2.327
7.Xiaolong Lu, Junhui, HU., Lin, Y., & Zhao, C. (2013). Principle and experimental verification of novel dual driving face rotary ultrasonic motor. Chinese Journal of Mechanical Engineering, 26(5), 1006-1012. SCI四区,IF0.263
6. Li,X., Zhou,S., Yao,Z.,Lu, X. (2013):Application of ultrasonic motor in locking device for magnetic bearing flywheel. In: Journal of Vibration, Measurement and Diagnosis, 33: 555-559. EI收录
*2012以前:
5.Xiaolong Lu, Junhui Hu*, Lin Yang, Chunsheng Zhao. A novel dual stator-ring rotary ultrasonic motor. Sensors & Actuators A Physical, 2013, 189(2): 504-511. SCI三区,IF2.327
4.Xiaolong Lu, Junhui Hu*, Chunsheng Zhao. Analyses of the temperature field of traveling-wave rotary ultrasonic motors. IEEE Transactions on Ultrasonics Ferroelectrics & Frequency Control, 2011, 58(12): 2708-2719 SCI2区,IF:2.743
3.Lu, X., Zhao,C.(2011): Characteristics of the thermopiezoelectric stator of an ultrasonic motor. In:Journal of Vibration Engineering, 24: 522-528. EI收录
2.Lu, X., Zhang,J., Zhao,C. (2011):Temperature field analysis for traveling-wave rotary ultrasonic motor. In: Proceedings of the Chinese Society of Electrical Engineering,31: 33-39. EI收录
1.Ren, J.,Lu, X., Liang, D., Zhu, H. (2011): Valve push rod mechanism of fuel regulator based on ultrasonic motor. In: Journal of Vibration, Measurement and Diagnosis, 31: 700-703. EI收录
(2)其他代表性成果
10.芦小龙(#)(*);王乐;赵淳生;薛成;吴树雄;王福飞,一种高速旋转超声电机及其定子的电激励方式,申请, 2016.8.1, CN201610615815.X (专利授权)
9.芦小龙(#)(*);赵康东,微声流驱动的旋转型纳米马达及其工作方法,申请, 2018.02.22, CN201810153393.8(专利公开)
8.芦小龙(#)(*);王乐;赵淳生;吴树雄;薛成;王福飞,一种基于面外弯曲振动模态高速旋转超声电机, 2016.8.1,CN201610615744.3(专利公开)
7.芦小龙(#)(*);胡俊辉,高能效压电超声换能器及其端盖, 2018.12.13,中国, CN201610489676.0 (专利授权)
6.芦小龙(#)(*);胡俊辉;赵淳生,新型双齿面旋转超声电机定子及其激励方式, 2015.5.20,中国, CN201210210642.5 (专利授权)
5.芦小龙(#)(*);陈超;吴树雄;薛成;王均山;朱鹏飞;陈海鹏;王福飞,一种耐冲击耐高旋型超声电机, 2017.6.30,中国, CN201610077832.2 (专利授权)
4.芦小龙(#)(*);胡俊辉;赵淳生,并联减摩驱动式超声电机, 2016.2.17,中国, CN201210210637.4 (专利授权)
3.Xiaolong Lu; Fernando Soto; Jinxing Li; Yuyan Liang; Joseph Wang, Acoustic Topographical Manipulations for Nanomotors, 2018 Global Workshop on Functional Materials and Devices (GW-FMD’2018), Nanyang Technological University, 2018.1.11-2018.1.13 (会议特邀报告)
2.芦小龙, 2010全国压电和声波理论及器件技术研讨会优秀论文, 2010全国压电和声波理论器件及应用研讨会组委会, 2010.12.13 (科研奖励)
1.芦小龙, 2011全国压电和声波理论及器件技术研讨会优秀论文, 2011全国压电和声波理论器件及应用研讨会组委会, 2011.12.10 (科研奖励)
国内外合作团队
(1)University of California SanDiego,USA,Prof. Joseph Wang
(2)Leibniz University Hannover, Germany, Prof. Jorg Wallaschek
(3)Max Planck Institute for Intelligent System, Germany, Prof. Peer Fischer
(4)南京工业大学,材料科学与工程学院
(5)南京大学,物理学院声学研究所
通过与上述学术机构建立广泛的合作关系,为将来开展国际合作项目和研究生交换项目奠定了良好的基础。
指导学生情况
(1)博士研究生1人:王乐(15级,联合指导)
(2)硕士研究生4人:魏莹(19级)、沈晖(18级)、王志文(18级)、赵康东(17级)
(3)本科大学生创新训练团队4个:
4.基于超声辅助组装的纳米马达(2019年,许晓宇等5人,校级)
3.基于压电作动的微型水下自重构机器人(2019年,潘天越等5人,国家级)
2.光伏电站的超声行波除尘技术(2018年,黄宇翔等3人,省级)
1.用于回收汽车尾气有毒物质的智能道路护栏(2018年,朱寅鑫等4人,院级)
学生获奖/团队荣誉
5.王志文,获得“2019年研究生创新基地开放基金”项目资助,2019
4.沈晖,获得“2019年研究生创新基地开放基金”项目资助,2019
3.赵康东,入选校“十佳研究生”,2019
2.王志文,2019年全国压电和声波理论及器件应用研讨会,优秀学生论文奖,2019
1.沈晖,2019年全国压电和声波理论及器件应用研讨会,优秀学生论文奖,2019
*********************************************************
“态度决定高度,细节决定成败!” 欢迎优秀学子们加入MIA小组攻读研究生和进行科创活动。

微纳马达的声操控技术
基于声流效应的高转速微马达

基于超声电机的光伏除尘技术
微型水下机器人单体


