彭瀚旻,2011年南京航空航天大学工学博士毕业,美国南加州大学Viterbi工程学院访问学者,江苏省优青。长期从事压电作动器和传感器、柔性机器人的力学理论、设计方法和应用研究。以第一作者或通讯作者发表SCI源刊22篇,部分研究成果在美国科学促进会(AAAS)的EurekAlert!网站上以新闻亮点形式报道以及被美国物理联合会(AIP)以Scilight的形式进行了专题报道。主持国家自然科学基金项目2项(面上、青年),江苏省自然科学基金项目2项(优青、青年),国家重点实验室自主研究课题2项(重点、青年),参与其他国家重大项目2项,等等。授权国家发明专利18项。曾多次与指导的研究生共同参加国际/国内会议并做特邀和口头陈述报告,包括美国、法国、日本、韩国、立陶宛、土耳其等。国家知识产权局中国发明专利技术审查专家、中国机械工程学会微纳制造技术分会委员、中国振动学会高级会员、《振动、测试与诊断》EI核心期刊编委、IEEE member、中国航空学会会员、中国声学学会会员等。曾获第二届全国高校教师教学创新大赛一等奖,其他省部级以上奖项5项。
◆ 学科研究方向一:机械设计及理论(招收博士/硕士研究生)。目前主要研究方向为压电作动器在医疗领域的应用与开发,压电机器人设计,柔性机器人设计等。(详见页面下方研究成果)
◆学科研究方向二:专业方向为工程力学(招收硕士研究生)。目前主要研究方向为超声电机理论研究,柔性驱动机器人振动学分析,超声振动建模理论,生物医疗机器人动力学建模及应用分析。
◆ 办公室电话: 025-84895853
◆ 邮件:penghm@nuaa.edu.cn
◆发表学术论文,出版专著:
1、期刊论文:
1) Fenghua Shen, Hanmin Peng, Song Pan, Pancheng Zhu. Phased Array Ultrasound Enhanced Delivery of Nano Drugs for Tendon Adhesion Treatment[J]. Applied Acoustics, 2023, 204: 109231. (通讯作者,影响因子:3.614,JCR一区);
2) Ziyan Chen, Huayi Wu, Shuang Zhao, Xiang Chen, Tianhong Wei, Hanmin Peng, and Zeyu Chen. 3D-Printed Integrated Ultrasonic Microneedle Array for Rapid Transdermal Drug Delivery[J]. Molecular Pharmaceutics, 2022, 19(9): 3314-3322. (共同通讯作者,影响因子:5.364,JCR一区);
3) Hao Wan, Hanmin Peng, Xiongfeng Tang and Wangyi Chen. A Small Piezoelectric Stack Motor Designed for Vacuum and Micro-Dust Environment[J]. Smart Materials and Structures, 2022, 32(1): 015009. (通讯作者,影响因子:4.131,JCR二区);
4) Queenlisajoan Olan’g, Hanmin Peng, Ting Mao. Characteristics of A Small Arbitrary Walking and Jumping Composite Soft Actuator with Origami Structure[J]. Sensors and Actuators A: Physical, 2022, 347: 113904. (共同通讯作者,影响因子:4.291,JCR一区);
5) Pancheng Zhu, Hanmin Peng. Theory and Method of Temperature Control for Drug Release in Hydrogel Phantom of Gastric Mucosa in Vitro[J]. Journal of Applied Physics. 2021, 129(21): 214506. (通讯作者,影响因子:2.877,JCR二区);
8) Hanmin Peng, Linli Mao, Xuejun Qian, Xiaolong Lu, Laiming Jiang, Yizhe Sun, and Qifa Zhou. Acoustic Energy Controlled Nanoparticle Aggregation for Nanotherapy[J]. IEEE Transactions on Ultrasonics Ferroelectrics and Frequency Control. 2020, 67(4): 735-744. (第一作者和通讯作者,影响因子:3.267,JCR二区);
9) Pancheng Zhu, Hanmin Peng, Xiaolong Lu, Mingsen Guo, Gai Zhao and Wenwen Liu. A Steerable Miniature Legged Robot Based on Piezoelectric Bending Actuators[J]. Smart Materials and Structures. 2020, 29(4): 045009. (通讯作者,影响因子:4.131,JCR二区);
10) Hanmin Peng, Ting Mao, and Xiaolong Lu. A Small Legged Deformable Robot with Multi-Mode Motion[J]. Journal of Intelligent Material Systems and Structures. 2020, 31(5): 704-718. (第一作者和通讯作者,影响因子:2.774,JCR三区);
12) Hanmin Peng, Penghui Lu, Jie Hu, Linli Mao and Kangdong Zhao. Steerable Miniature Ambulatory Robot Based on Piezoelectric Actuation with A Caltrop-Like Structure[J]. Smart Materials and Structures. 2020, 29(1): 015011. (第一作者和通讯作者,影响因子:4.131,JCR二区);
13) Hanmin Peng, Xuejun Qian, Linli Mao, Laiming Jiang, Yizhe Sun, and Qifa Zhou. Ultrafast Ultrasound Imaging in Acoustic Microbubble Trapping[J]. Applied Physics Letters. 2019, 115(20): 203701. (共同第一作者,影响因子:3.931,JCR二区);
14) Pancheng Zhu, Hanmin Peng and Jianzhi Yang. Analyses of The Temperature Field of A Piezoelectric Micro Actuator in The Endoscopic Biopsy Channel[J]. Applied Sciences-Basel. 2019, 9(21): 4499. (通讯作者,影响因子:2.838,JCR三区);
15) Ting Mao, Hanmin Peng, Xiaolong Lu and Chunsheng Zhao. A Small Locust Inspired Actuator Driven by Shape Memory Alloys and Piezoelectric Strips[J]. Smart Materials and Structures. 2019, 28(10): 105051. (通讯作者,影响因子:4.131,JCR二区);
16) Hanmin Peng, Jianzhi Yang, Xiaolong Lu, Pancheng Zhu, and Dawei Wu. A Lightweight Surface Milli-Walker Based on Piezoelectric Actuation[J]. IEEE Transactions on Industrial Electronics. 2019, 66(10): 7852-7860. (第一作者和通讯作者,影响因子:8.162,JCR一区);
18) Jie Hu, Hanmin Peng, Tingyu Liu, Xinke Yao, Huiyang Wu, Penghui Lu. A Flow Sensing Method of Power Spectrum Based on Piezoelectric Effect and Vortex-Induced Vibrations[J]. Measurement. 2019, 131: 473-481. (通讯作者,影响因子:5.131,JCR一区);
19) Jie Hu, Hanmin Peng, and Xinke Yao. Design of PVDF Sensor Array for Determining Airflow Direction and Velocity[J]. Review of Scientific Instruments. 2018, 89(8): 085007. (通讯作者,影响因子:1.843,JCR三区);
20) Pancheng Zhu, Hanmin Peng, Jianzhi Yang, Ting Mao and Juan Sheng. A New Low-Frequency Sonophoresis System Combined with Ultrasonic Motor and Transducer[J]. Smart Materials and Structures. 2018, 27(3): 035021. (通讯作者,影响因子:4.131,JCR二区);
21) Hanmin Peng, Pancheng Zhu, Penghui Lu. Acoustic Streaming Simulation and Analyses in In Vitro Low Frequency Sonophoresis[J]. Sensors and Actuators A-Physical. 2017, 263: 744-753. (第一作者和通讯作者,影响因子:4.291,JCR一区);
22) Hanmin Peng, Pancheng Zhu, Zhijun Chen. Thermal Analyses of In Vitro Low Frequency Sonophoresis[J]. Ultrasonics Sonochemistry. 2017, 35: 458-470. (第一作者和通讯作者,影响因子:9.336,JCR一区);
23) 冒林丽,彭瀚旻,卢鹏辉,毛婷. 流速扰动聚焦超声下纳米颗粒聚集的研究(Nanoparticle Aggregation by Focused Ultrasound Under Flow Rate Disturbance)[J]. 振动.测试与诊断. 2021, 41(04): 784-791. (EI核心收录)
24) 毛婷,彭瀚旻,查泽琳,赵燊佳. 形状记忆合金驱动的连续跳跃柔性机器人(Continuous Jumping Soft Robot Driven by Shape Memory Alloy)[J]. 振动.测试与诊断. 2021, 41(03): 447-452. (EI核心收录)
25) 杨剑之, 彭瀚旻,圣娟,朱攀丞,基于杆式直线超声电机的微量注射系统[J],振动、测试与诊断,39(6):1311-1315,2019.12 (EI核心收录)
26) 姚新科, 彭瀚旻, 胡捷, 基于压电双晶片的风速辨识系统[J], 振动、测试与诊断, 38(1):190-195,2018 (EI核心收录)
27) 彭瀚旻,卢鹏辉,喻伯平,陈致钧,密封系统对低频超声透皮给药的影响[J],振动、测试与诊断,36(4):790-795,2016.8 (EI核心收录)
28) 彭瀚旻,喻伯平,毛婷,朱攀丞,陈致钧,低频超声透皮给药过程流场影响分析[J],振动、测试与诊断,36(6):1109-1115,2016.12 (EI核心收录)
29) 彭瀚旻,陈致钧,卢鹏辉,冒林丽,低频超声透皮给药系统压电-声-热计算模型[J],振动、测试与诊断,35(6):1037-1043,2015.12 (EI核心收录)
2、会议论文:
1) Fenghua Shen, Hanmin Peng*, Focused Ultrasound for Reducing Adhesion Degree of Muscle Tendon Phantom, The 16th Symposium on Piezoelectricity, Acoustic Waves, and Device Applications, November 12th - 15th, 2022, Nanjing, China, 分会报告
2) Pancheng Zhu, Hanmin Peng*, Jianzhi Yang, Chunsheng Zhao, Thermal Analyses of a Piezoelectric Micro-Actuator Operated in Endoscopic Biopsy Channel, International Workshop on Piezoelectric Materials and Applications in Actuators 2019 (IWPMA2019), October 1st – 4th, 2019, Lyon, France, 分会报告
4) Pancheng Zhu, Hanmin Peng*, Chunsheng Zhao, Control Strategy of a Steerable Miniature Legged Robot based on Piezoelectric Actuators , International Workshop on Piezoelectric Materials and Applications in Actuators 2018, September 11 - 14, Kobe, JAPAN 2018. 分会报告
5) Hanmin Peng*, Dawei Wu and Chunsheng Zhao, A Study of Acoustic Temperature Coupled Model in Low Frequency Sonophoresis,The 14th International Workshop on Piezoelectric Materials and Applications & 12th Energy Harvesting Workshop & 1th Annual Energy Harvesting Society Meeting,September 11 – 14, 2017,Falls Church, VA, USA. 分会报告
6) Hanmin Peng*, Pancheng Zhu and Chunsheng Zhao, Acoustic Streaming Simulation and Analyses in Low Frequency Sonophoresis,The 13th International Workshop on Piezoelectric Materials and Applications & Energy Conversion Materials and Devices, August 21-24, 2016, Jeju, Korea.分会报告
7) Hanmin Peng* and Chunsheng Zhao, CHARACTERISTICS OF SONOPHORESIS ON RAT SKIN AND ARTIFICIAL MEMBRANE,The 12th International Workshop on Piezoelectric Materials and Applications in Actuators,June 28 – July 1, 2015, Vilnius, Lithuania. 分会报告
8) Hanmin Peng, Jinjuan Zhou, Junhui Hu*, Thermal Analyses of the Ultrasonic Transducer with a Heat Dissipation System,The 10th International Congress on Thermal Stresses, 05.31-06.04, Nanjing, China, 2013. 分会报告
9) Hanmin Peng, Jinjuan Zhou, Junhui Hu*, An Ultrasonic Transducer with Heat Dispersion System, The 23rd International Conference on Adaptive Structures and Technologies (ICAST 2012), 10.11-13, Nanjing, China, 2012. 分会报告
10) Hanmin Peng, Jinjuan Zhou, Junhui Hu*, Analysis of Energy Efficiency of a Box Type Sono-reactor at Resonance, The 6th Symposium on Piezoelectricity, Acoustic Waves, and Device Applications, 12.09-11, pp. 9-12,Shenzhen,China, 2011. 分会报告 (EI: 20122715188787)
11) Jinjuan Zhou, Hanmin Peng, Junhui Hu*, Study on energy efficiency of box type non-resonant sono-reactor, The 6th Symposium on Piezoelectricity, Acoustic Waves, and Device Applications, 12.09-11, pp. 48-51,Shenzhen,China, 2011. 分会报告 (EI: 20122715188797)
3、发明专利:
1) 朱攀丞,彭瀚旻,李辰赫,运用于狭窄空腔中的刚柔一体爬行作动器及其工作方法,2022-10-21,中国,CN202010183818.7
2) 朱攀丞,彭瀚旻,王逖清,阵列吸盘式刚柔一体爬行作动器及其工作方法,2022-06-17,中国,CN 202010182958.2
3) 彭瀚旻,朱攀丞,陈致均,基于压电驱动的血管给药治疗装置及其工作方法,2022-04-22,中国,CN201610148105.0
4) 毛婷,彭瀚旻,冒林丽,多模式柔性机器人及其控制方法,2021-07-27,中国,CN201811391743.0
5) 张雨秋,彭瀚旻,朱攀丞,风速感知作动器及其工作方法,2021-05-08,中国,CN202010727925.1
6) 毛婷,彭瀚旻,冒林丽,基于压电驱动的柔性机器人及其控制方法,2021.02.26,中国,CN201810767792.3
7) 彭瀚旻,冒林丽,时运来,一种应用于浅表肿瘤的靶向治疗超声给药系统及工作方法,2021.02.19,中国,CN201811420413.X
8) 毛婷,彭瀚旻,冒林丽,一种基于压电驱动的腿式跳跃机器人及其控制方法,2020.04.07,中国,CN201811087537.0
9) 卢鹏辉,彭瀚旻,时运来,冒林丽,基于压电驱动的六足作动器及其工作方法,2020.03.17,中国,CN201811483104.7
10) 杨建林,孙志峻,彭瀚旻,王均山,金家楣,一种利用交替自锁的呈等腰梯形布置的爬杆作动器,2020.02.14,中国,CN201811465131.1
11) 杨建林,孙志峻,彭瀚旻,王均山,金家楣,一种交替自锁爬杆式压电作动器,2019.10.25,中国,CN201811380685.1
12) 彭瀚旻,胡捷,姚新科,一种感知环境变化的微型压电式机器人及环境感知方法,2019.08.16,中国,CN201711235049.5
13) 胡捷,姚新科,彭瀚旻,陈超,一种感知空间环境变化的新型微型球形传感器及其制备方法,2019.06.14,中国,CN201611235635.5
14) 彭瀚旻,胡捷,陈超,姚新科,一种压电纤毛感知空间气流变化弹用传感器组件,2018.03.13,中国,CN201611100740.8
15) 彭瀚旻,卢鹏辉,朱攀丞,基于压电驱动的三基体作动器及其工作方法,2016.8.3,中国, CN201610251428.2
16) 彭瀚旻,胡俊辉,陈超,一种体内蠕动式检测与治疗一体化机器人,2013.7.17,中国,CN201310298682.4
17)彭瀚旻, 胡俊辉, 陈超, 一种体内蠕动式检测与治疗一体化机器人, 2013.7.17, 中国, CN201310298682.4
18)胡俊辉,彭瀚旻,周金娟,一种超声换能器, 2012.7.9,中国, CN201210234735.1
◆ 承担的科研项目:
1) 国家重点实验室重点项目,MCMS-I-0319Y01,介入手术机器人末端感知与超声协同的驱动机理研究,2022/01-2023/12, 60万元,在研,主持;
2) 国家自然科学基金联合项目,U2037603,空间超声电机长效服役机理与集成制造技术基础,2021/01-2024/12, 950万元,在研,参与;
3) 国家自然科学基金面上项目,51875280,消化道复杂环境下药液超声促渗动力学行为分析与优化,2019/01-2022/12,60万元,结题,主持;
4) 江苏省优秀青年科学基金项目,BK20180067,基于内窥镜的超声药物控释技术研究,2018/07-2021/06,50万元,结题、主持;
5) 国家自然科学基金青年项目,51405224,基于压电复合结构的精确、可控、无创透皮给药装置的设计理论和方法,2015/01-2017/12,25万元,结题、主持;
6) 江苏省科技计划项目青年基金项目,BK20140818,低频超声无创透皮给药系统中压电精确控制技术的研究,2014/07-2017/06,20万元,优秀结题、主持;
7) 国家自然科学基金面上项目,51275228,超声电机技术标准的基础研究, 2013/01-2016/12, 80万元,结题、参加。
◆指导研究生情况:
指导研究生13名,其中学生获得荣誉:【国家级】指导的研究生获国家奖学金(2021)、CSC留学奖学金在荷兰代尔夫特理工大学访学(2021);【省部级】江苏省省级“三好学生”(2021);【校级】优秀硕士毕业论文2名(2019)、第八届“群星”创新奖(2021)、研究生拔尖创新人才“引航之星”称号(2022)等。指导毕业的研究生进入航天一院、航空工业、上海中航和上海联影等国家重要单位和知名企业,继续发扬创新精神。
◆部分研究成果图:
1、学科研究方向一(机械设计及理论部分举例)
1)压电作动器在医疗领域的应用与开发


(c) (d)
(e)

(f) (g)
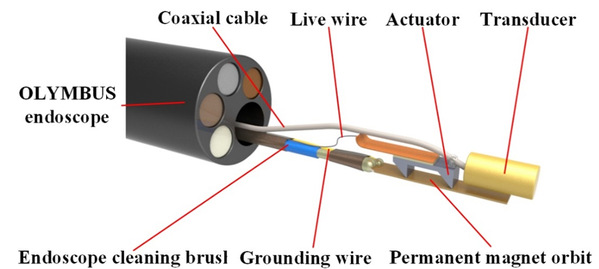
图1适用于内窥镜的微小型压电作动器:(a)微型压电作动器结构图;(b)实物图;
(c)内窥镜活检通道内压电作动器工作原理图; (d)运动实物图;
(e)与超声换能器的安装示意图; (f)超声换能器驱动侧视动图;(g)超声换能器驱动正视动图
2)压电机器人设计

图2 压电爬行机器人
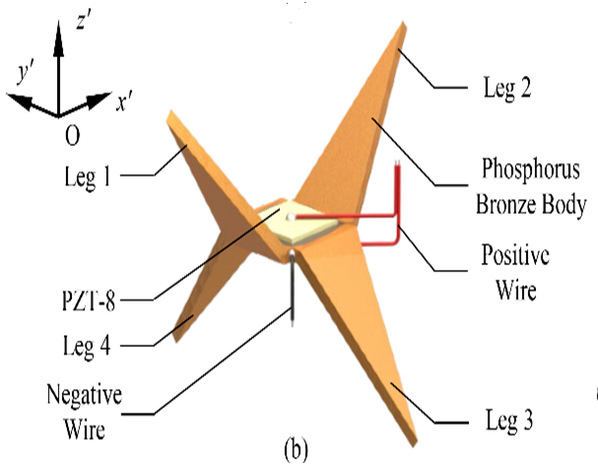
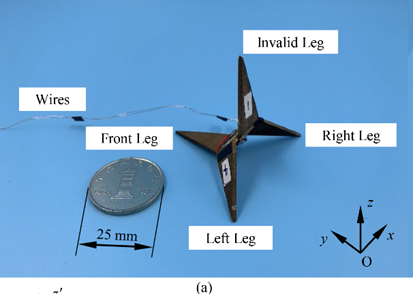
图3任意翻转压电爬行机器人
3)柔性机器人设计

(a) (b)
(c)
(d)
图4 三种柔性爬行机器人:(a)多模运动腿式机器人;(b)仿蝗虫跳跃机器人;
(c)混合跳跃-行走机器人;(d)迷宫运动图
2、学科研究方向二(工程力学部分举例)
1)柔性驱动机器人振动学分析
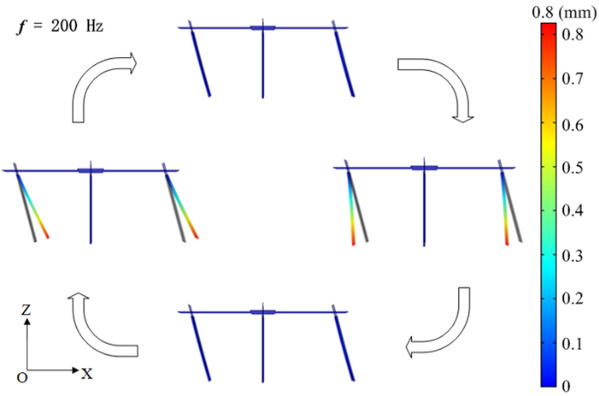
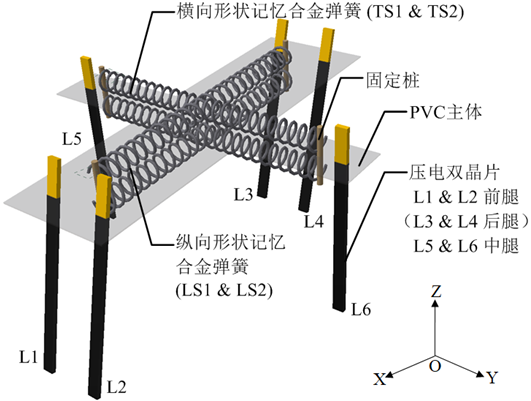
(a) (b)
图5 六足柔性爬行机器人振动仿真计算:(a)结构示意图;(b)振动模态计算结果
2)超声振动建模理论
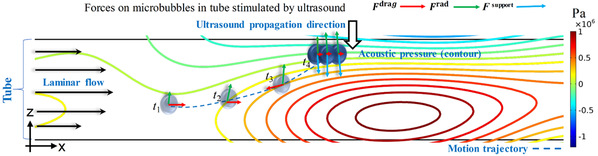

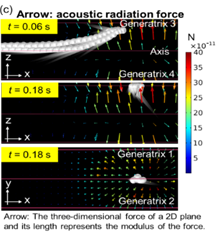
图6 超声靶向药物聚集仿真计算
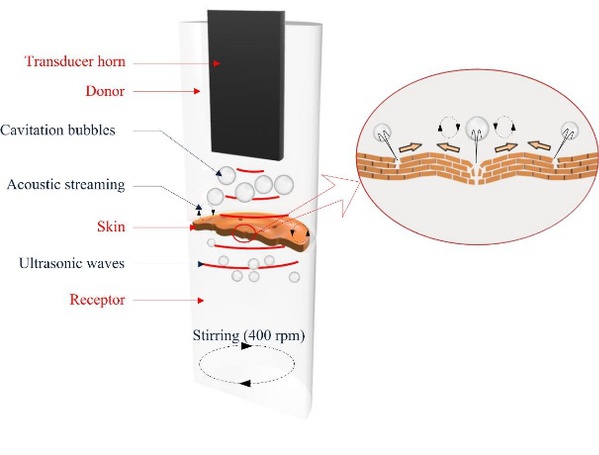
(a)

(b)
图7 超声透皮给药理论分析:(a) 超声透皮给药原理图;(b)皮肤声场与热场计算结果图
3)生物医疗机器人动力学建模
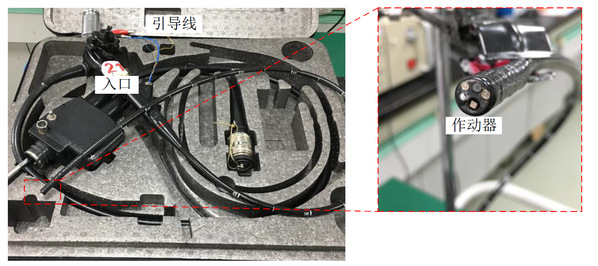

图8 消化道内镜爬行作动器振动模态仿真分析结果图


